大家好,欢迎收看直观机械,今天我们来一起看一看步进电机的基本结构和原理。
在工业自动化中,步进电机的应用非常的广泛。例如工业机器人、3D打印机、计算机硬盘等都有步进电机的身影。步进电机的特殊性在于它可以控制转子的角度位置,而不需要传感器来控制位置,因此是一种开环控制系统。与直流无刷电机相似,他们都是通过控制线圈的通电时序,使磁铁之间产生相互作用的力来旋转。

根据步进电机的构造,可以分为永磁式、反应式和混合式3种。目前最常用的是混合式步进电机,因为它综合了永磁式和反应式的优点。我们先通过永磁式步进电机来了解一些其结构和控制原理,然后进一步了解反应式和混合式步进电机的结构和控制原理。

为了增大磁感应强度,减少涡轮损失,步进电机的转子和定子框架都是由高磁导率的硅钢片叠成。在定子框架上有4个定子齿,将其绕上两组线圈并通电后,根据电磁感应原理,此时线圈就变成了电磁铁。

根据右手定则,一端会变成N极一端会变成S极,这种极性的变化可以通过改变电源的正负极来实现转换。如果将电源的正负极转换加上一定的规律性,定子部分就行形成一个旋转的磁场,这样转子就会随着旋转的磁场而转动。而转子的转动有一个很重要的参数,那就是:步距角。步距角就是一个脉冲信号转子转过的角度,其计算公式为:360度除以括号转子齿数乘以运行拍数(永磁体齿数可以认为为1)。此步进电机的步距角为90度。


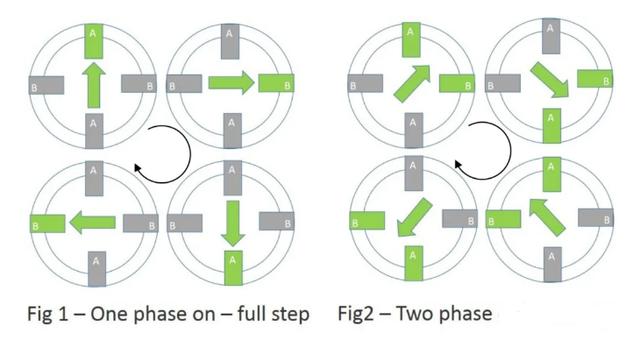
步进电机并不能直接接电源工作,因为步进电机的是通过脉冲信号来控制器工作的,因此步进电机的工作需要驱动器来控制。通过PLC编程控制脉冲的数量和频率以及电机各相绕组的功率顺序,控制步进电机的旋转。步进电机的驱动方式有3种,即满步、半步以及微步驱动。而根据通电相数,满步驱动又分为单相满步驱动和双相满步驱动两种,这个看图片我们就很容易能看懂。
半步驱动就是一次只驱动半个步距,它是通过单双电交替通电实现的。当单相通电时,一个线圈产生磁场,转子指向通电的线圈,而当双相通电时,两个线圈都产生磁场,合成的磁场使转子处于中间位置。大家可以看图片理解一下。

微步驱动其实也不难理解。随着电流的大小变化,线圈磁场的强度也会随之变化,转子的平衡位置也会发生变化,这就是微步驱动的原理。A线圈开始有最大电流,B线圈电流为0,转子指向A线圈。如果A线圈电流慢慢减小,B线圈电流慢慢增大,转子就会慢慢的转向B线圈。宏观来看,A、B线圈的电流变化都接近于三角函数曲线。电流每一步变化的大小,则决定了微步运动的大小。虽然步数越多,运动越平滑,但是扭矩也会相应的减小。


反应式步进电机的转子是由软性材料制作而成的,转子上有多个凸极,这样线圈通电时,才会吸引转子旋转。这类电机结构简单,成本低,但是动态性能差,可靠性不好,因此很少使用。

目前最常用的是混合式步进电机,这类电机综合了以上两种电机的优点。步距角小,力矩大,动态性能好。混合式步进电机的转子比较特殊,它是由两个带齿钢杯装在永磁铁的中心轴上组成的。转子一端N极一端为S极,N及与S极齿牙是错位的。常用的混合式步进电机为1.8度步距角,转子有50齿,而定子只有48齿,分为8个主极。如果将这8个主极分为4对,我们会发现其中1对定子与转子的齿牙是完全对齐的,一对定子与转子的齿牙是错牙的,另外两组的定子与转子的齿牙则是半对齐的。当给定子一个脉冲信号时,定子磁场发生变化,转子就会轻微移动以便与定子齿位对齐,在全驱动情况下,每次移动都是一个凹齿或者凸齿的一半,这个角度就是1.8度。如果是半步驱动的话,这个角度会进一步减小,也就是0.9度。

以上就是步进电机的基本原理,不知道大家看懂了没呢?
,
")
")
")
")
")
")
")
")
")
")
")
")
")
")